Notable achievements (all in TensorFlow):
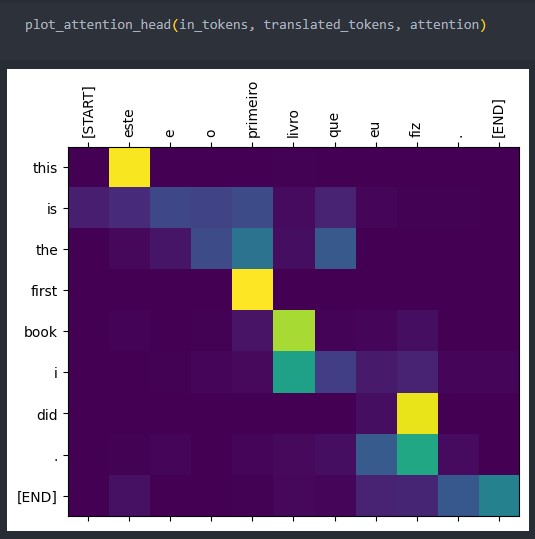
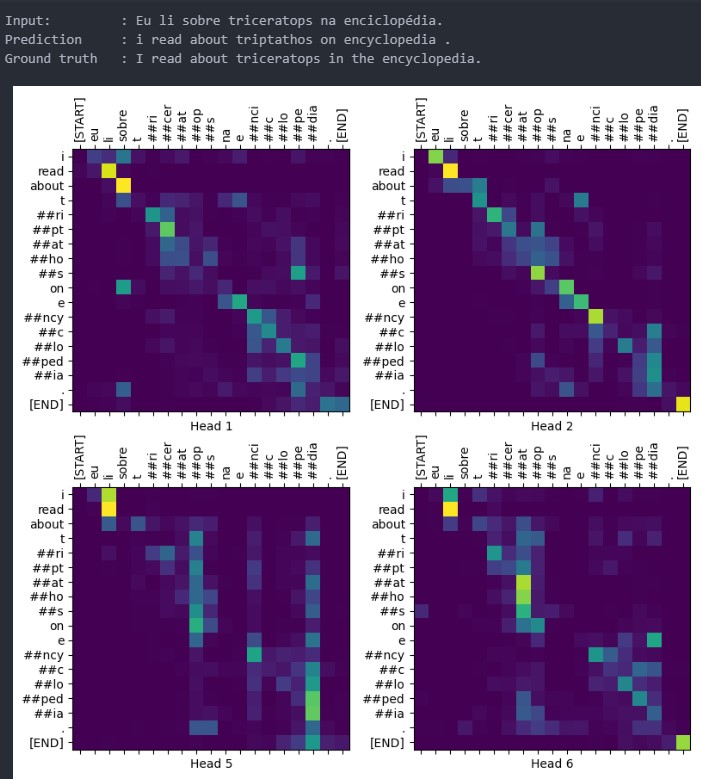
Built and trained a transformer to translate Portuguese sentences to English with a bleu score of 0.28.
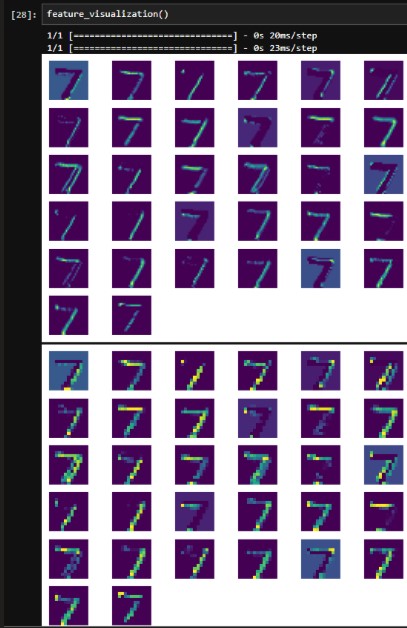
Created Resnet18 from scratch utilizing residual connections between convolutional layers on MNIST.
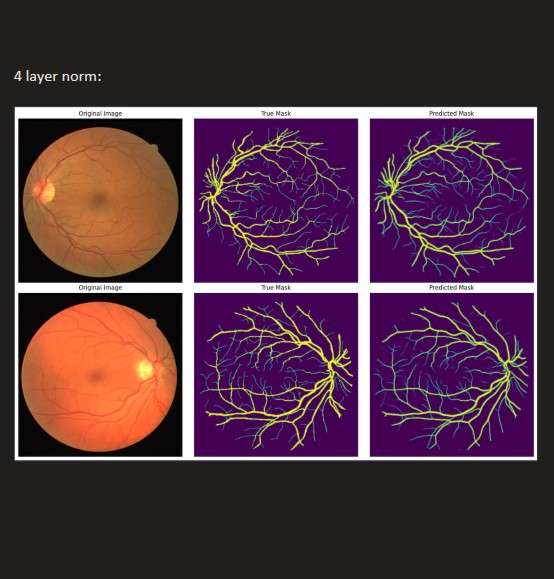
Also created a U-Net from scratch with the purpose of pixel-wise segmentation for vein detection in iris scans.
Worked on an LSTM-autoencoder for anomaly detection in time-series sales data on my co-op during Summer 2023.
Machine Learning
Notable achievements (most in Numpy):
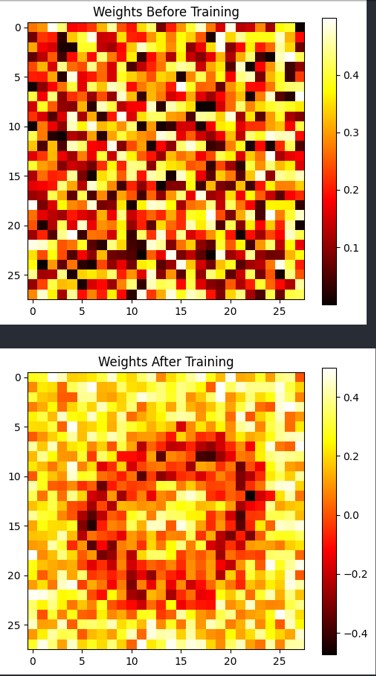
Built an autoencoder and feed forward neural network with custom made neural network architecture.
Designed a single perceptron network to detect images of 0 or 1.
Programmed machine learning algorithms from scratch such as minimax for tic tac toe.
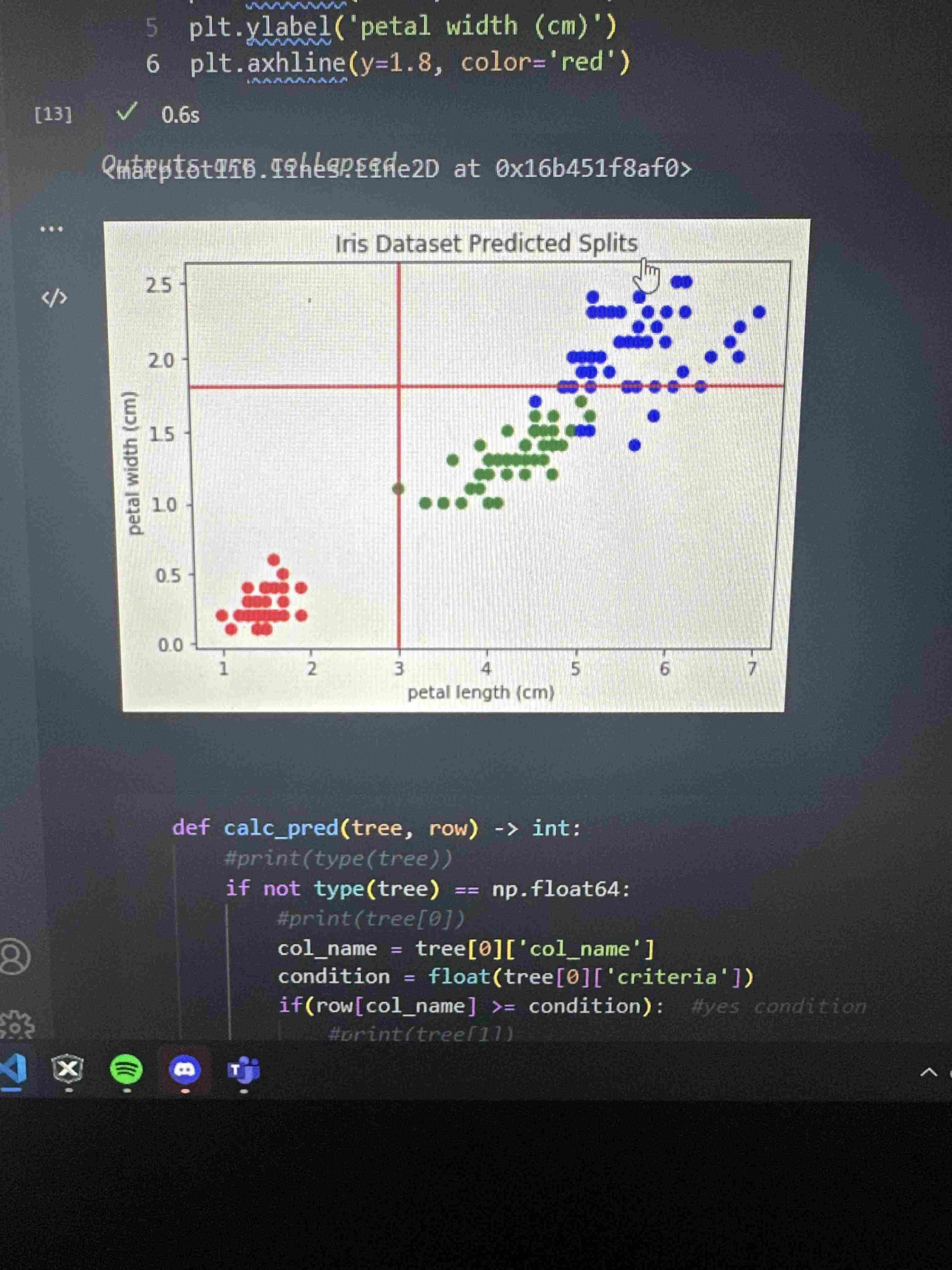
Built decision trees and random forest models from scratch.